
Pendahuluan
Perkembangan teknologi IoT (Internet of Things) telah membawa kemudahan dalam membuat berbagai perangkat pintar, salah satunya adalah mobil robot berbasis WiFi. Dengan memanfaatkan modul NodeMCU ESP8266, kita bisa membuat robot yang dapat dikendalikan langsung melalui smartphone tanpa memerlukan router tambahan. Ini sangat cocok untuk pembelajaran maupun hobi di bidang elektronika dan pemrograman.
Robot mobil ini bekerja dengan cara NodeMCU membuat jaringan WiFi sendiri (Access Point). Smartphone cukup terhubung ke jaringan tersebut, lalu perintah kontrol dikirim melalui aplikasi khusus bernama ESP8266 WiFi Robot Car yang bisa diunduh di Play Store. Dengan aplikasi ini, robot dapat bergerak maju, mundur, belok kiri, belok kanan, dan berhenti. Bahkan, kecepatan motor bisa diatur secara real-time hanya dengan menekan tombol virtual pada aplikasi.
Proyek ini juga fleksibel untuk dikembangkan. Setelah berhasil membuat versi dasar, kamu bisa menambahkan sensor jarak, kamera FPV, hingga kontrol jarak jauh melalui internet. Dengan kombinasi NodeMCU ESP8266 dan aplikasi ESP8266 WiFi Robot Car, proyek ini menjadi salah satu cara termudah untuk memahami konsep kontrol robot berbasis WiFi dan jaringan lokal.
Komponen yang Digunakan
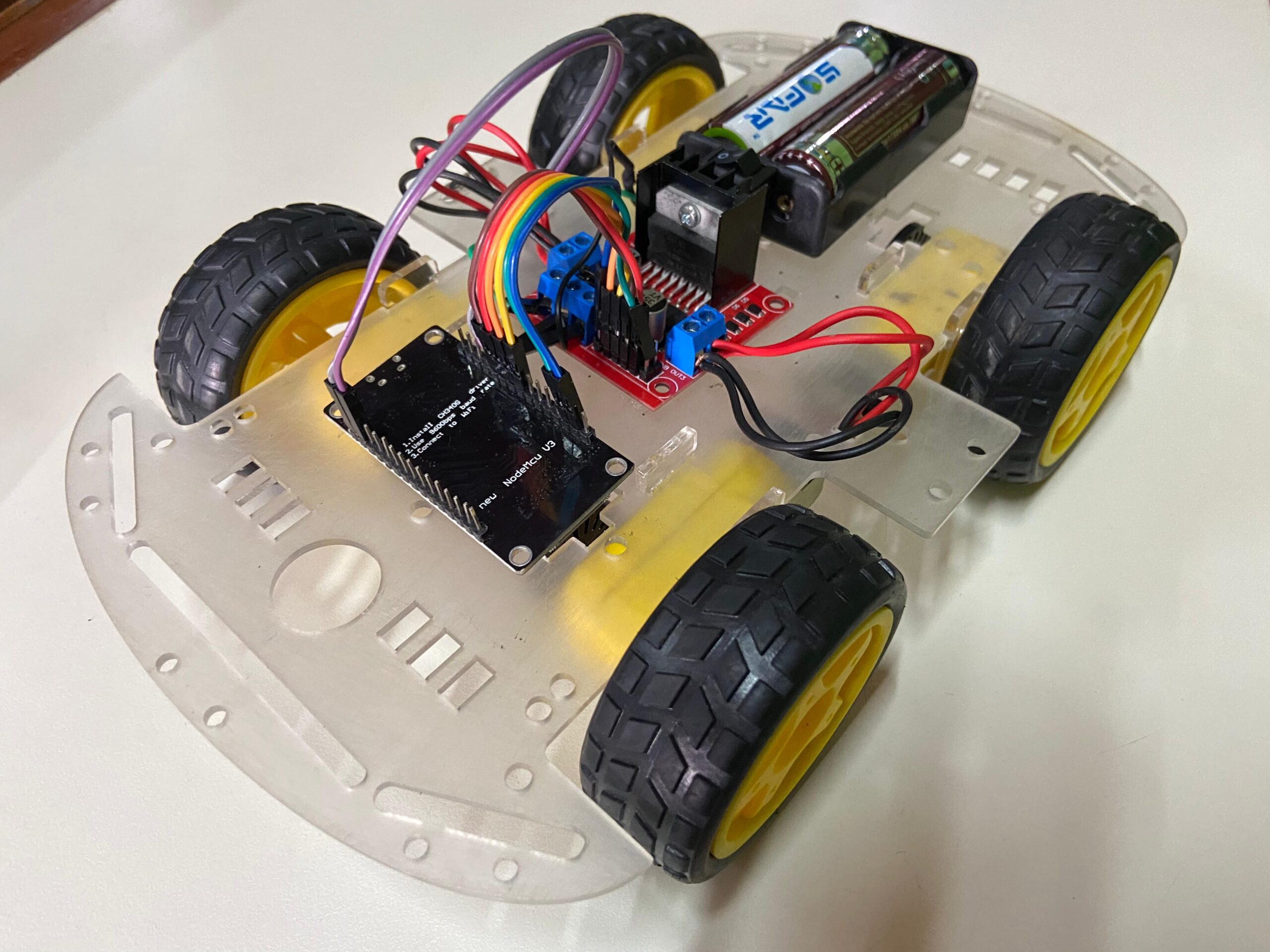
- NodeMCU ESP8266
- Driver Motor L298N
- 4 Motor DC dan Roda
- Chassis Robot 4WD
- Baterai Li-ion 7.4V (2S)
- Kabel jumper
- Smartphone Android
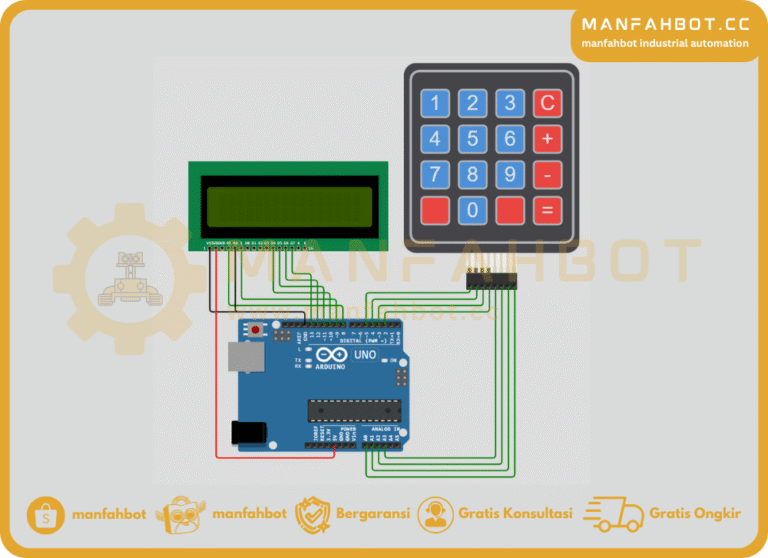
Skema Rangkaian
")
Koneksi Rangkaian
NodeMCU ke Driver Motor
| NodeMCU ESP8266 | Driver Motor |
|---|---|
| D5 (GPIO14) | ENA |
| D6 (GPIO12) | ENB |
| D8 (GPIO15) | IN1 |
| D7 (GPIO13) | IN2 |
| D2 (GPIO4) | IN3 |
| D1 (GPIO5) | IN4 |
| GND | GND Driver |
Baterai ke Driver Motor
| Baterai 7.4V | Driver Motor |
|---|---|
| +7.4V | VIN / +12V Driver |
| GND | GND Driver |
Driver Motor ke NodeMCU
| Driver Motor | NodeMCU |
|---|---|
| 5V Output | VIN NodeMCU |
| GND | GND NodeMCU |
Library dan Aplikasi yang Harus Ditambahkan
- ✅ ESP8266WiFi
- ✅ WiFiClient (sudah termasuk dalam core ESP8266)
- ✅ ESP8266WebServer
📲 Aplikasi Android untuk kontrol:
Video Simulasi
🎥 Lihat demo simulasi robot ini langsung di YouTube:
Kode Program Lengkap
//PROGRAM INI DI BUAT OLEH : MANFAHBOT INDUSTRIAL AUTOMATION
//HAK CIPTA PROGRAM/CODING : CARISSA DWI WIRASTUTI
//WEBSITE : http://manfahbot.cc
#define ENA 14 // D5
#define ENB 12 // D6
#define IN_1 15 // D8
#define IN_2 13 // D7
#define IN_3 4 // D2
#define IN_4 5 // D1
#include <ESP8266WiFi.h>
#include <WiFiClient.h>
#include <ESP8266WebServer.h>
String command; // Menyimpan perintah dari aplikasi
int speedCar = 800; // Nilai PWM motor (400 - 1023)
const char* ssid = "MANFAHBOT"; // Nama WiFi Access Point
ESP8266WebServer server(80);
void setup() {
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN_1, OUTPUT);
pinMode(IN_2, OUTPUT);
pinMode(IN_3, OUTPUT);
pinMode(IN_4, OUTPUT);
Serial.begin(115200);
// Membuat Access Point WiFi
WiFi.mode(WIFI_AP);
WiFi.softAP(ssid);
IPAddress myIP = WiFi.softAPIP();
Serial.print("AP IP address: 192.168.4.1");
Serial.println(myIP);
// Setup HTTP server
server.on("/", HTTP_handleRoot);
server.onNotFound(HTTP_handleRoot);
server.begin();
}
void Maju() {
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
analogWrite(ENB, speedCar);
}
void Mundur() {
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void BelokKanan() {
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
analogWrite(ENB, speedCar);
}
void BelokKiri() {
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void Berhenti() {
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void loop() {
server.handleClient();
command = server.arg("State");
if (command == "F") Maju();
else if (command == "B") Mundur();
else if (command == "L") BelokKiri();
else if (command == "R") BelokKanan();
else if (command == "0") speedCar = 400;
else if (command == "1") speedCar = 470;
else if (command == "2") speedCar = 540;
else if (command == "3") speedCar = 610;
else if (command == "4") speedCar = 680;
else if (command == "5") speedCar = 750;
else if (command == "6") speedCar = 820;
else if (command == "7") speedCar = 890;
else if (command == "8") speedCar = 960;
else if (command == "9") speedCar = 1023;
else if (command == "S") Berhenti();
}
void HTTP_handleRoot(void) {
if (server.hasArg("State")) {
Serial.println(server.arg("State"));
}
server.send(200, "text/html", "");
delay(1);
}Penjelasan Singkat Program
✅ NodeMCU membuat WiFi Access Point bernama MANFAHBOT
✅ Aplikasi ESP8266 WiFi Robot Car mengirimkan perintah F (Maju), B (Mundur), L (Belok kiri), R (Belok kanan), dan S (Stop) melalui HTTP Request
✅ Perintah angka 0–9 mengatur kecepatan motor (PWM 400–1023)
✅ Driver motor menerima sinyal logika arah dan PWM untuk mengatur motor kiri dan kanan
✅ Motor mendapat suplai langsung dari baterai, bukan dari NodeMCU, sehingga lebih kuat
Kesimpulan
Mobil robot WiFi berbasis NodeMCU ESP8266 ini adalah proyek sederhana namun bermanfaat untuk belajar kontrol robot secara nirkabel. Dengan aplikasi ESP8266 WiFi Robot Car, robot dapat dikendalikan langsung dari smartphone tanpa perlu router tambahan atau web interface.
Proyek ini bisa dikembangkan lebih lanjut dengan menambahkan sensor ultrasonik, kamera FPV, hingga konektivitas IoT untuk kontrol jarak jauh melalui internet. Bagi pemula, ini adalah langkah awal yang baik untuk memahami pemrograman mikrokontroler, jaringan WiFi, dan kontrol motor DC.
Ayo Belajari Otomasi Industri Bersama MANFAHBOT, Kami menyediakan layanan:
- Pelatihan Otomasi & PLC
- Pengembangan Sistem Simulasi
- Jasa Rancang Bangun Sistem Otomatisasi
- Pembuatan sistem kontrol berbasis robotik
- Pendampingan proyek akhir atau PKL SMK/D4/S1
🌐 manfahbot.cc
📧 info@manfahbot.cc
📞 WhatsApp: +62 859-5646-3532